【ここで加速を決めろ!フォアフットロッカーの願い】歩き方のしくみ⑨

記事【足首を回転していく脚のスピードが勝負を決める!アンクルロッカーへの挑戦】歩き方のしくみ⑧に引き続き、今回も正しい歩き方を知るために絶対に理解しておいて欲しい「ロッカー機構」についてお話しします。
この記事の中でお話しする、ロッカー機構を成立させるための筋肉の働きについての解説は、一般的に言われている内容になります。
実際に正しい歩き方を身につけるためには、それ以外の事柄の方が大切だったりします。
では、今回は「フォアフットロッカー」についてです。
今回はまず、フォアフットロッカーについて解説する前に、「体重ベクトル」というものを説明していきます。
なぜなら、フォアフットロッカーについて理解するには、体重ベクトルのことを理解している必要があるからです。
目次
体重ベクトル
体重ベクトルとは、重力、筋力、慣性力の3つのベクトルを合わせたベクトルです。
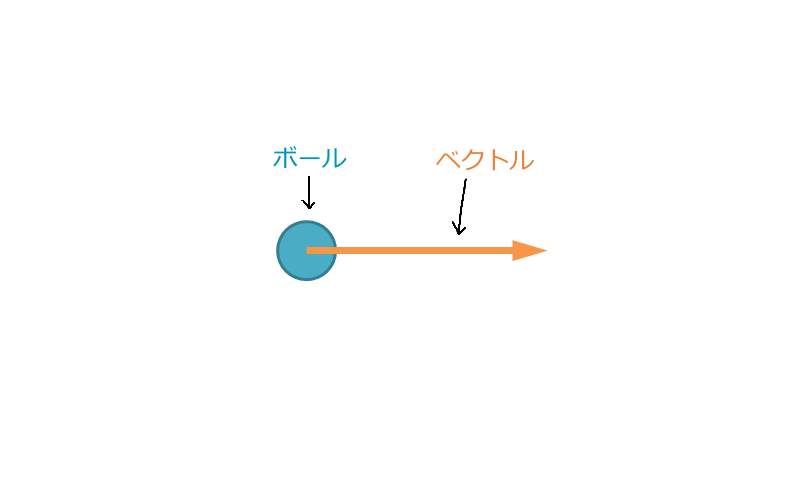
図1:ベクトル
ベクトルとは、大きさと向きを持った量です。
ベクトルは、よく矢印で表されます。
例えば、ある青いボールに力が加わっているとします。
この力のベクトルを矢印で表すと図1のようになります。
この図で、矢印の長さは力の大きさを、矢印の向きは力の向きを表しています。
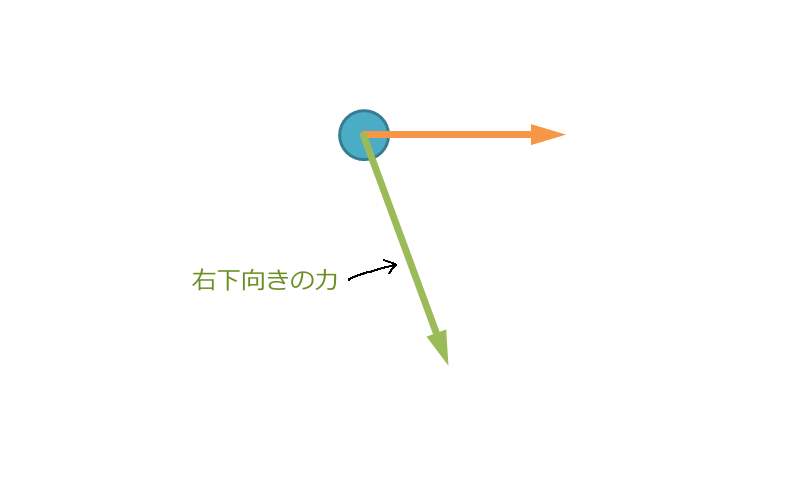
図2:2つのベクトル
図1の右向きの力が加わっているボールに、右下向きの力を加えるとどうなるでしょうか?(図2)
多くの人は、ボールはそれら矢印の間へ進んで行くだろう、その方向へ力がかかることになるだろうと予測すると思います。
しかし、その力の大きさや向きは、正確には分からないと思います。
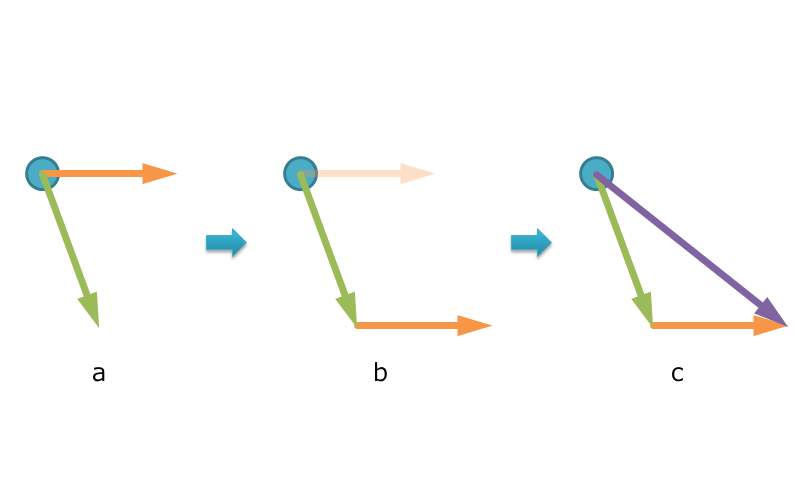
図3:ベクトルの合成
しかし、ベクトルを利用すると、それが簡単に分かります。
どのようにすれば良いかというと、ベクトルの矢印を平行移動して、他のベクトルにつなげれば良いのです(図3)。
まず、図3bのように、オレンジの矢印を平行移動して、その始点を、緑の矢印の終点につなげます。
次に図3cのように、緑の矢印の始点と、オレンジの矢印の終点を、新たな紫の矢印でつなげます。
この紫の矢印、つまりこの新たなベクトルが、ボールにかかる力の大きさと向きを表すことになります。
このように、2つ以上のベクトルをつないで新たな状態を表すことを、ベクトルの合成といいます。
つまり、体重ベクトルは、重力のベクトル、筋力のベクトル、慣性力のベクトルを合成したものです。
慣性力とは、物体がその運動状態を維持しようとする力です。
物体にはそのような性質があります。
止まっている物はずっと止まっていようとしますし、動いている物はずっと同じ状態で動いていようとします。
私たちが歩いているとき、身体は前へ進んでいますが、身体には前へ進むことを維持する力が働いています。
この力が、歩いているときの慣性力です。
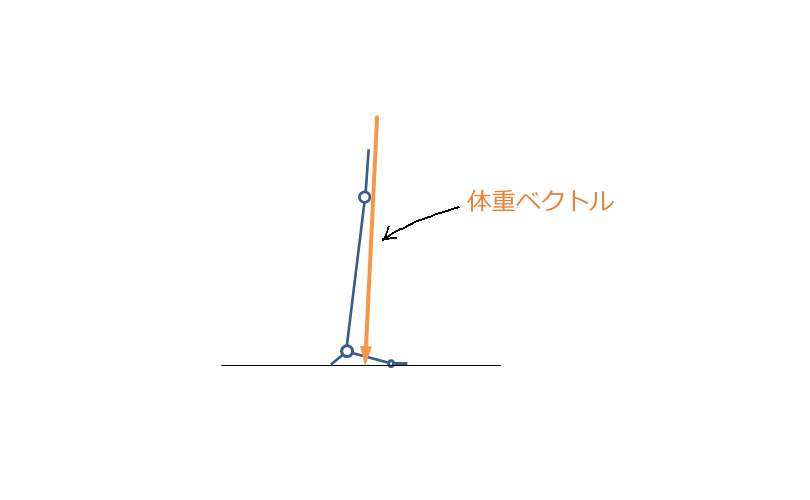
図4:体重ベクトル
体重ベクトルは、歩行中に片脚立ちになっているとき、常に足底(足の裏)のどこかに向かっています(図4)。
つまり、そのときの体重ベクトルは、足で地面を押している力ともいえます。
またそれは、地面に対して、真っ直ぐだったり、斜めだったりします。
そして、この体重ベクトルが、足底のどこを通っているかで、フォアフットロッカーが始まるかどうかが決まります。
③フォアフットロッカー
前回説明したアンクロッカーは、中足骨頭(指のつけ根あたり)が地面に着くことで始まり、踵が持ち上がることで終わります。
このアンクルロッカーが行われているとき、体重ベクトルは、踵から前方へ移動してきます。
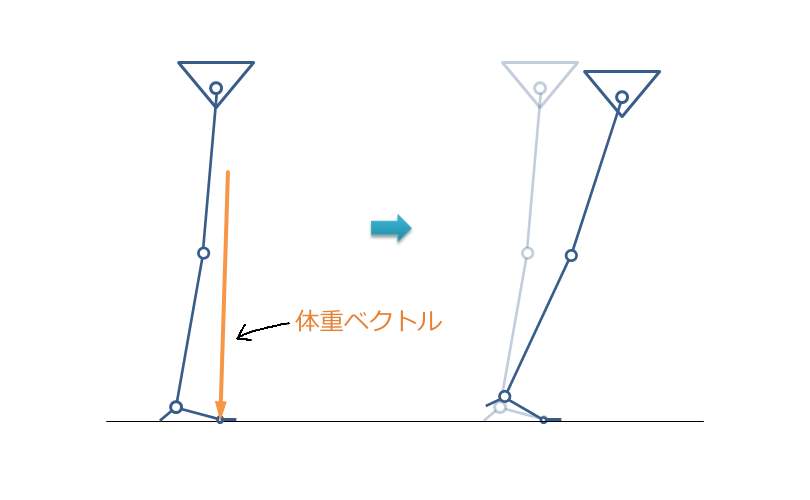
図5:フォアフットロッカー
そして、体重ベクトルが中足骨頭に達し、前方に進んでいくと、踵が持ち上がっていきます。
つまり、中足骨頭を支点として、脚が前方へ回転していきます。
これを、フォアフットロッカー(前足部ロッカー)といいます(図5)。
歩行スピードの加速
フォアフットロッカーで踵が持ち上がり始めると、身体は前方へ落下し始めます。
このとき、身体の前進が加速されます。
ちなみにこのとき、重心は最も高い位置にあります。
この加速は、歩行の中で最も大きな推進力となります。
さらにこのとき、反対側の脚は、ちょうど前方へ振り出されている最中です。
この反対側の脚が前進しようとする力も、身体を前進させる推進力となります。
つまり、私たちが歩いているときは、このフォアフットロッカーのタイミングのときに加速しているのです。
そして、この加速に利用している力は、次の2つによって作られている、ということです。
【加速に利用している力の源】
①重力による身体の落下(位置エネルギー)
②反対側の脚の前進(運動エネルギー)
フォアフットロッカーと筋肉
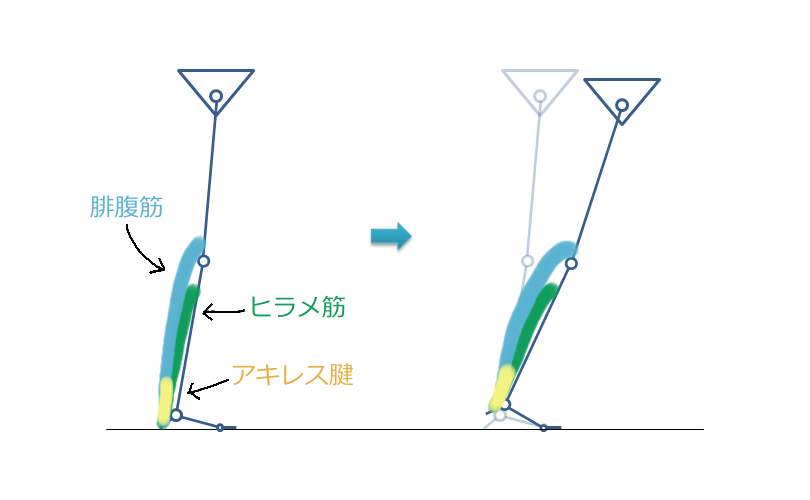
図6:ヒラメ筋と腓腹筋
フォアフットロッカーでは、ヒラメ筋と腓腹筋という筋肉が重要な働きをします(図6)。
腓腹筋は、大腿骨(太ももの骨)と踵を結ぶ筋肉です。
フォアフットロッカーが行われているとき、ヒラメ筋と腓腹筋は、足関節を固定する役割を果たしています。
加速できず推進力低下
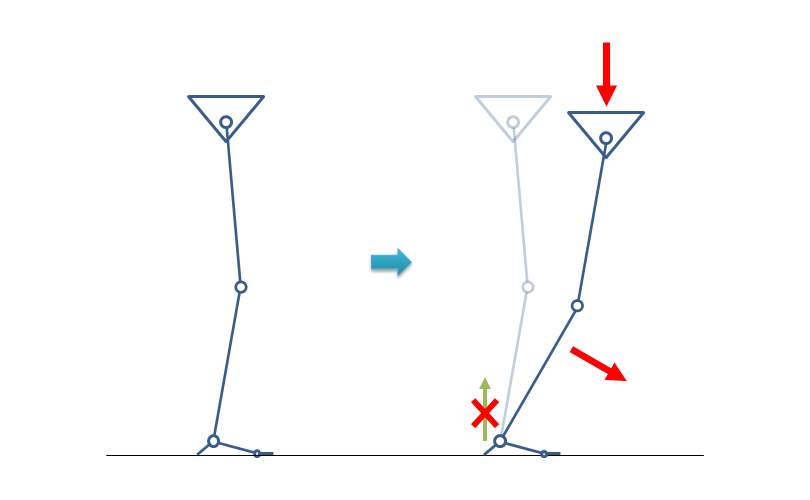
図7:ヒラメ筋と腓腹筋が働かない場合のフォアフットロッカー
ヒラメ筋と腓腹筋が働かないと、足関節(足首)が過度に背屈してしまいます(反ってしまいます)。
そうなると、踵が適切に持ち上がらなくなり、フォアフットロッカーの利点(加速など)が失われてしまいます(図7)。
また、重心も低くなってしまい、それによる様々な悪影響が出てしまい、効率の悪い身体へのダメージが大きい歩き方となってしまいます。
ちなみに、ヒラメ筋と腓腹筋が働かない場合、アンクルロッカーも適切に行われなくなります。
そのため、フォアフットロッカー開始時の脚の姿勢は、通常とは異なるようになります(図7)。
地面を蹴って身体を前に進めてはいない!
フォアフットロッカーは踵が持ち上がることで始まり、反対側の足が地面に着くことで終わります。
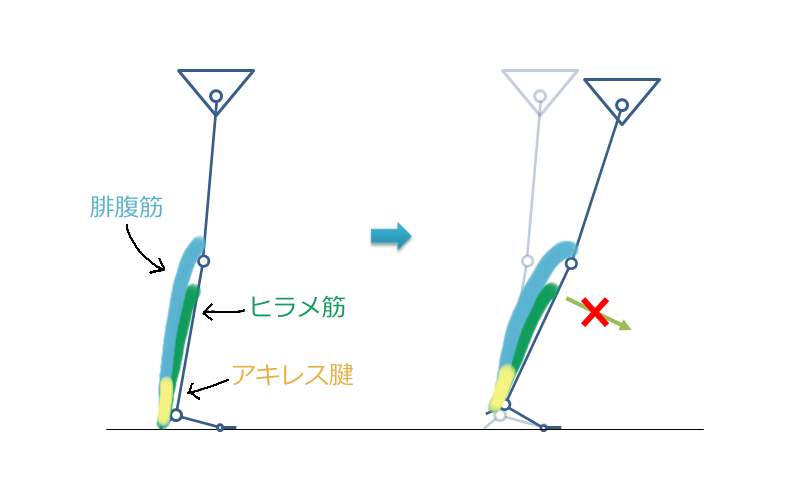
図8:フォアフットロッカーでのヒラメ筋と腓腹筋の働き
このフォアフットロッカーが行われているとき、足関節は背屈角度を大きくしていきます(反っていきます)。
また、このとき、脛骨(すねの骨)の前進は、加速するどころか減速していきます。
その最中に、反対側の足が地面に着きます。
つまり、このときのヒラメ筋と腓腹筋の活動は、推進力として働くのではなく、脚が前進しようとする慣性力を抑制するために働いているのです(図8)。
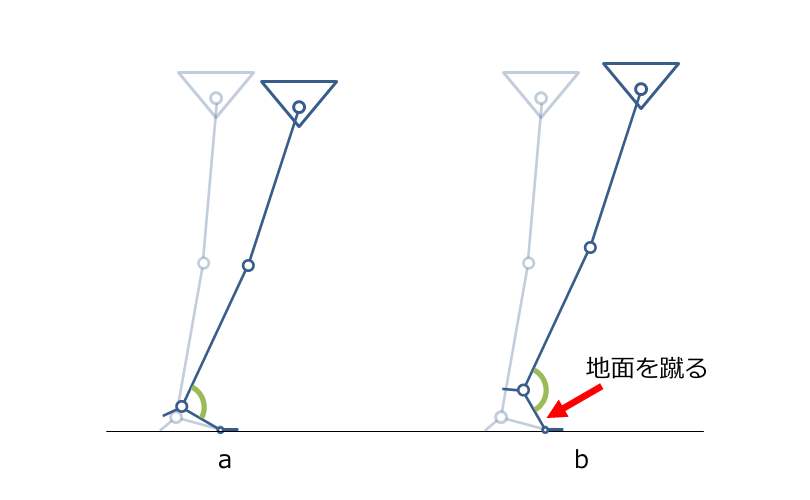
図9:実際の自然歩行と地面を蹴るときの足関節
a:実際の自然歩行の姿勢。足関節はやや背屈する(足首が反る)。
b:地面を蹴る場合の姿勢。足関節は底屈する(足首を倒す)。自然歩行ではこの動きは起らない。
このフォアフットロッカーが行われている期間に対して、よくプッシュオフ(push off:踏み切り、蹴り出し)という用語が用いられます。
このプッシュオフという言葉からは、「地面を蹴って前へ進む」というニュアンスを感じ取ってしまうと思います。
しかし、自然歩行(普段の歩行、自然に楽に歩いている状態)におけるこのタイミングでは、筋力によって「地面を蹴る」ようなことはしていません。
「地面を蹴る」には、足関節を底屈させなければ(倒さなければ)いけませんが(図9b)、自然歩行ではそのようなことは起らず、先ほど説明したように、むしろ逆に背屈していきます(図9a)。
「地面を蹴って身体を前に進めて歩いている」と思っている人は多いようですが、これは、このプッシュオフという用語が使われているために起こってしまった誤解なのではと思っています。
このことのために、実際の正しい歩き方のしくみが誤解されてしまっているようで、とても残念に思っています。
ただ、このフォアフットロッカーのタイミングでは、ヒラメ筋と腓腹筋に強い力が入るので、「地面を蹴って身体を前に進めている」という感覚になるのも、致し方ありませんが・・・(^^;)
次回は、トゥロッカーについて説明していきます。(^^)/
↓「歩き方や姿勢のしくみ」記事一覧はこちら
https://feuno.com/category/gait-posture-mechanism
私のサポート「痛みセラピー」を利用して、股関節、腰、膝の長引く痛みを、自分自身で根本的に治したい方は、こちらのページをご覧下さいね。⇒https://feuno.com/apply-for-therapy

手術宣告された股関節痛でも、手術せずに治せる可能性が十分にあります。私(管理人)が書いたレポート「股関節痛が治る最短ルート」では、私が経験した股関節痛だけではなく、他の長引く痛みも自分自身で治してしまった実例をあげ、股関節痛を最速最短で確実に治すために必要なことは何かについて、お話ししています。
股関節痛について本当のことを知って欲しいので、無料でプレゼントしています。是非受け取って下さいね!下のボタンをクリックして受け取りページに進んで下さい。(^^)/





コメントを残す